GD1#
In this notebook we replace the results in Alvey et al. 2024 on the GD1 stream.
# import os
# os.environ["CUDA_VISIBLE_DEVICES"] = "0"
from autocvd import autocvd
autocvd(num_gpus = 1)
import jax
import jax.numpy as jnp
from jax import jit, random
import equinox as eqx
from jax.sharding import Mesh, PartitionSpec, NamedSharding
# jax.config.update("jax_enable_x64", True)
import matplotlib.pyplot as plt
import numpy as np
from astropy import units as u
from astropy import constants as c
import odisseo
from odisseo import construct_initial_state
from odisseo.integrators import leapfrog
from odisseo.dynamics import direct_acc, DIRECT_ACC, DIRECT_ACC_LAXMAP, DIRECT_ACC_FOR_LOOP, DIRECT_ACC_MATRIX
from odisseo.option_classes import SimulationConfig, SimulationParams, MNParams, NFWParams, PlummerParams, PSPParams, MN_POTENTIAL, NFW_POTENTIAL, PSP_POTENTIAL
from odisseo.initial_condition import Plummer_sphere, ic_two_body, sample_position_on_sphere, inclined_circular_velocity, sample_position_on_circle, inclined_position
from odisseo.utils import center_of_mass
from odisseo.time_integration import time_integration
from odisseo.units import CodeUnits
from odisseo.visualization import create_3d_gif, create_projection_gif, energy_angular_momentum_plot
from odisseo.potentials import MyamotoNagai, NFW
from odisseo.utils import halo_to_gd1_velocity_vmap, halo_to_gd1_vmap, projection_on_GD1
plt.rcParams.update({
'font.size': 20,
'axes.labelsize': 20,
'xtick.labelsize': 13,
'ytick.labelsize': 13,
'legend.fontsize': 15,
})
plt.style.use('default')
#
Setting up the simulation parameters and configurations#
from odisseo.option_classes import DIFFRAX_BACKEND, TSIT5
code_length = 10 * u.kpc
code_mass = 1e4 * u.Msun
G = 1
code_time = 3 * u.Gyr
code_units = CodeUnits(code_length, code_mass, G=1, unit_time = code_time )
config = SimulationConfig(N_particles = 10_000,
return_snapshots = True,
num_snapshots = 1000,
num_timesteps = 1000,
external_accelerations=(NFW_POTENTIAL, MN_POTENTIAL, PSP_POTENTIAL),
acceleration_scheme = DIRECT_ACC_MATRIX,
softening = (0.1 * u.pc).to(code_units.code_length).value,
integrator=DIFFRAX_BACKEND,
fixed_timestep=False,
diffrax_solver=TSIT5
) #default values
params = SimulationParams(t_end = (3 * u.Gyr).to(code_units.code_time).value,
Plummer_params= PlummerParams(Mtot=(10**4.05 * u.Msun).to(code_units.code_mass).value,
a=(100 * u.pc).to(code_units.code_length).value),
MN_params= MNParams(M = (68_193_902_782.346756 * u.Msun).to(code_units.code_mass).value,
a = (3.0 * u.kpc).to(code_units.code_length).value,
b = (0.280 * u.kpc).to(code_units.code_length).value),
NFW_params= NFWParams(Mvir=(4.3683325e11 * u.Msun).to(code_units.code_mass).value,
r_s= (16.0 * u.kpc).to(code_units.code_length).value,),
PSP_params= PSPParams(M = 4501365375.06545 * u.Msun.to(code_units.code_mass),
alpha = 1.8,
r_c = (1.9*u.kpc).to(code_units.code_length).value),
G=code_units.G, )
key = random.PRNGKey(500000000)
#set up the particles in the initial state
positions, velocities, mass = Plummer_sphere(key=key, params=params, config=config)
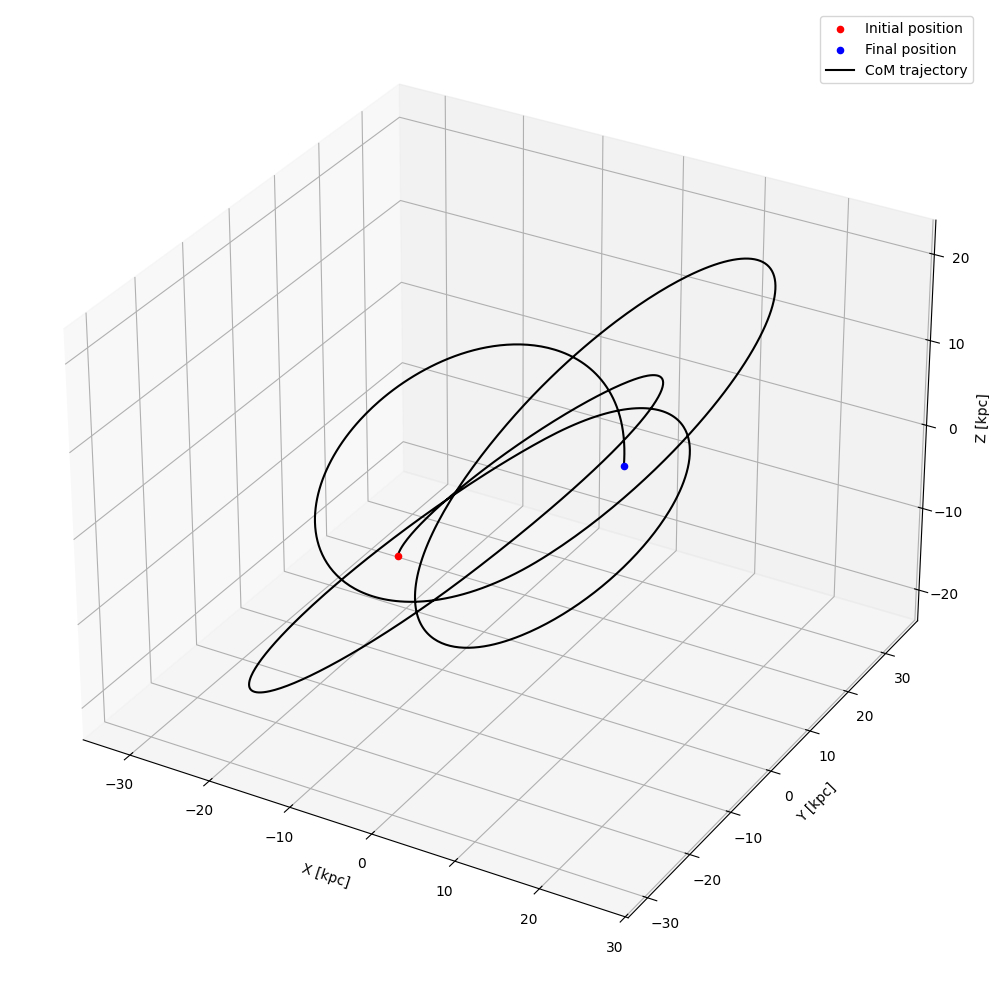
#the center of mass needs to be integrated backwards in time first
config_com = config._replace(N_particles=1,)
params_com = params._replace(t_end=-params.t_end,)
#this is the final position of the cluster, we need to integrate backwards in time
pos_com_final = jnp.array([[11.8, 0.79, 6.4]]) * u.kpc.to(code_units.code_length)
vel_com_final = jnp.array([[109.5,-254.5,-90.3]]) * (u.km/u.s).to(code_units.code_velocity)
mass_com = jnp.array([params_com.Plummer_params.Mtot])
final_state_com = construct_initial_state(pos_com_final, vel_com_final) # state is a (N_particles x 2 x 3)
#evolution in time
snapshots_com = time_integration(final_state_com, mass_com, config_com, params_com)
#we can plot the snapshots of simulations, the snapshot are NameTuple with states=(N_snapshots x N_particles x 2 x 3) array
pos_com, vel_com = snapshots_com.states[-1, :, 0], snapshots_com.states[-1, :, 1]
##### CoM orbit plot####
fig = plt.figure(figsize=(15, 10), tight_layout=True)
ax = fig.add_subplot(111, projection='3d')
ax.scatter(snapshots_com.states[-1, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[-1, 0, 0, 1]* code_units.code_length.to(u.kpc),
snapshots_com.states[-1,0, 0, 2]* code_units.code_length.to(u.kpc),c='r', label='Initial position')
ax.scatter(snapshots_com.states[0, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[0, 0, 0, 1]* code_units.code_length.to(u.kpc),
snapshots_com.states[0,0, 0, 2]* code_units.code_length.to(u.kpc), c='b', label='Final position')
ax.plot(snapshots_com.states[:, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[:, 0, 0, 1]* code_units.code_length.to(u.kpc),
snapshots_com.states[:,0, 0, 2]* code_units.code_length.to(u.kpc), 'k-', label='CoM trajectory')
ax.set_xlabel("X [kpc]")
ax.set_ylabel("Y [kpc]")
ax.set_zlabel("Z [kpc]")
ax.legend()
plt.show()
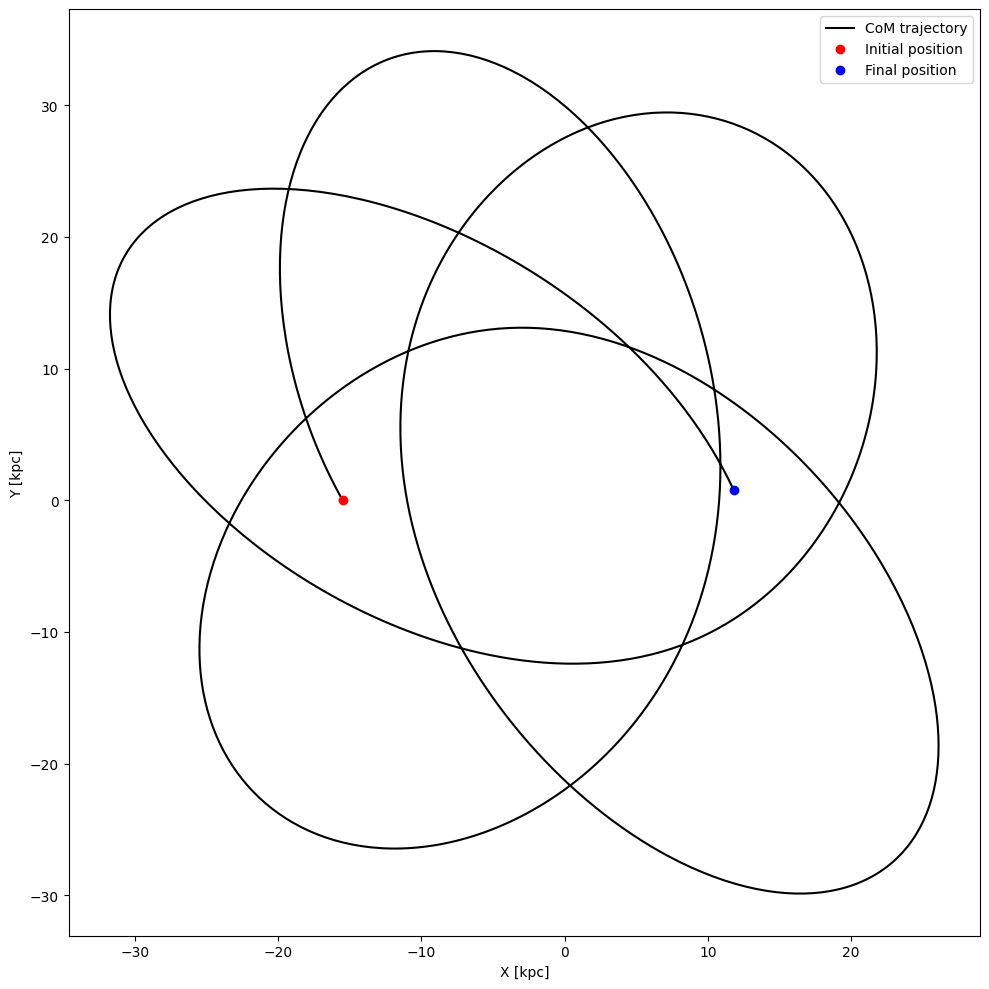
fig = plt.figure(figsize=(10, 10), tight_layout=True)
ax = fig.add_subplot(111)
ax.plot(snapshots_com.states[:, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[:, 0, 0, 1]* code_units.code_length.to(u.kpc), 'k-', label='CoM trajectory')
ax.plot(snapshots_com.states[-1, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[-1, 0, 0, 1]* code_units.code_length.to(u.kpc), 'ro', label='Initial position')
ax.plot(snapshots_com.states[0, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[0, 0, 0, 1]* code_units.code_length.to(u.kpc), 'bo', label='Final position')
ax.set_xlabel("X [kpc]")
ax.set_ylabel("Y [kpc]")
ax.legend()
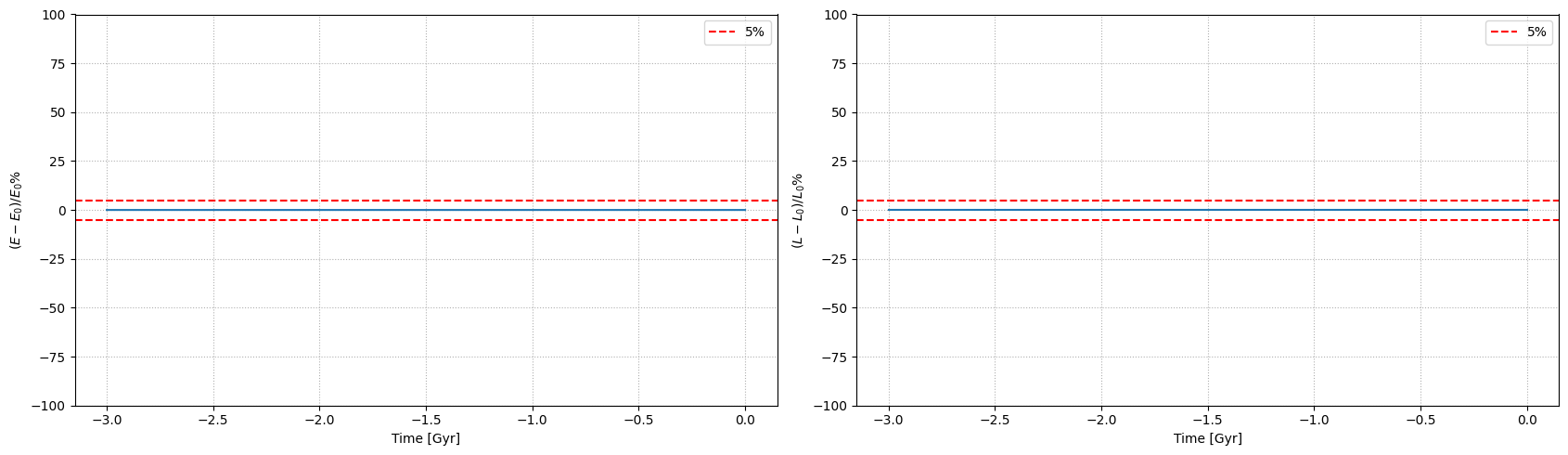
#check conservation of energy and angular momentum
energy_angular_momentum_plot(snapshots_com, code_units,)
Dwarf Galaxy position and velocity#
# Add the center of mass position and velocity to the Plummer sphere particles
positions = positions + pos_com
velocities = velocities + vel_com
#initialize the initial state
initial_state_stream = construct_initial_state(positions, velocities)
#run the simulation
snapshots = time_integration(initial_state_stream, mass, config, params)
plt.style.use('default')
# Create a circular ring (solid line)
radius = 8 #kpc
z_disk = 0
theta = np.linspace(0, 2*np.pi, 500)
x_ring = radius * np.cos(theta)
y_ring = radius * np.sin(theta)
z_ring = np.full_like(theta, z_disk)
fig = plt.figure(figsize=(15, 15), tight_layout=True,)
ax = fig.add_subplot(111, projection='3d')
for i in np.linspace(0, config.num_snapshots, 8, dtype=int):
ax.scatter(snapshots.states[i, :, 0, 0] * code_units.code_length.to(u.kpc),
snapshots.states[i, :, 0, 1] * code_units.code_length.to(u.kpc),
snapshots.states[i, :, 0, 2] * code_units.code_length.to(u.kpc),
label=f"t={(snapshots.times[i]*code_units.code_time).to(u.Gyr):.2f}",
s=50)
ax.plot(snapshots_com.states[:, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[:, 0, 0, 1]* code_units.code_length.to(u.kpc),
snapshots_com.states[:,0, 0, 2]* code_units.code_length.to(u.kpc), 'k-', alpha=0.5, label='CoM trajectory')
# ax.scatter(0, 0, 0, c='k', s=100, )
# Ring (Milky Way disk)
# ax.plot(x_ring, y_ring, z_ring, color="royalblue", linewidth=3, label="MW Disk")
r = 8
n = 500
# Random polar points inside the disk
theta = np.random.uniform(0, 2*np.pi, n)
rho = r * np.sqrt(np.random.uniform(0, 1, n)) # ensures uniform density
x = rho * np.cos(theta)
y = rho * np.sin(theta)
z = np.zeros_like(x)
# Triangular surface
ax.plot_trisurf(x, y, z, color="lightgray", alpha=0.7, linewidth=0, label="MW Disk")
ax.set_xlabel('X [kpc]', fontsize=20)
ax.set_ylabel('Y [kpc]', fontsize=20)
ax.set_zlabel('Z [kpc]', fontsize=20)
ax.legend(fontsize=20, ncol=5)
ax.tick_params(axis='both', which='major', labelsize=17) #
# ax.axis('off')
fig.savefig("gd1_orbit.pdf", bbox_inches='tight')
# Remove the grid
# ax.grid(False)
energy_angular_momentum_plot(snapshots, code_units,)
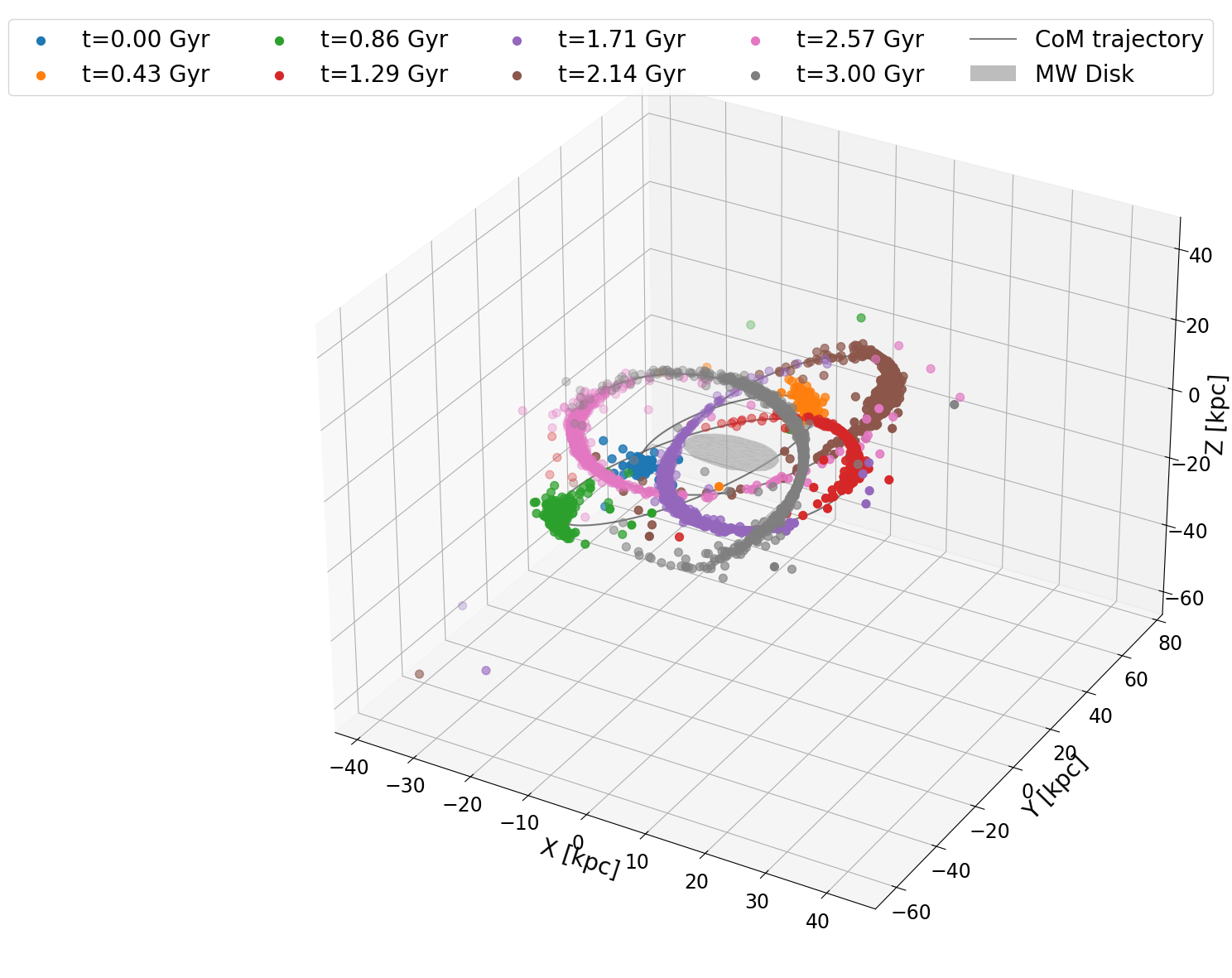
fig = plt.figure(figsize=(10, 10), tight_layout=True)
ax = fig.add_subplot(111)
ax.plot(snapshots_com.states[:, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[:, 0, 0, 1]* code_units.code_length.to(u.kpc), 'r-', label='CoM trajectory')
ax.plot(snapshots_com.states[-1, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[-1, 0, 0, 1]* code_units.code_length.to(u.kpc), 'ro', label='Initial position')
ax.plot(snapshots_com.states[0, 0, 0, 0]* code_units.code_length.to(u.kpc),
snapshots_com.states[0, 0, 0, 1]* code_units.code_length.to(u.kpc), 'bo', label='Final position')
ax.scatter(snapshots.states[-1, :, 0, 0]* code_units.code_length.to(u.kpc),
snapshots.states[-1, :, 0, 1]* code_units.code_length.to(u.kpc), s=0.1, label='Final positions of the stream')
ax.set_xlabel("X [kpc]")
ax.set_ylabel("Y [kpc]")
# ax.set_xlim(-30, 30)
# ax.set_ylim(-30, 30)
ax.legend()
<matplotlib.legend.Legend at 0x7399cc15e390>
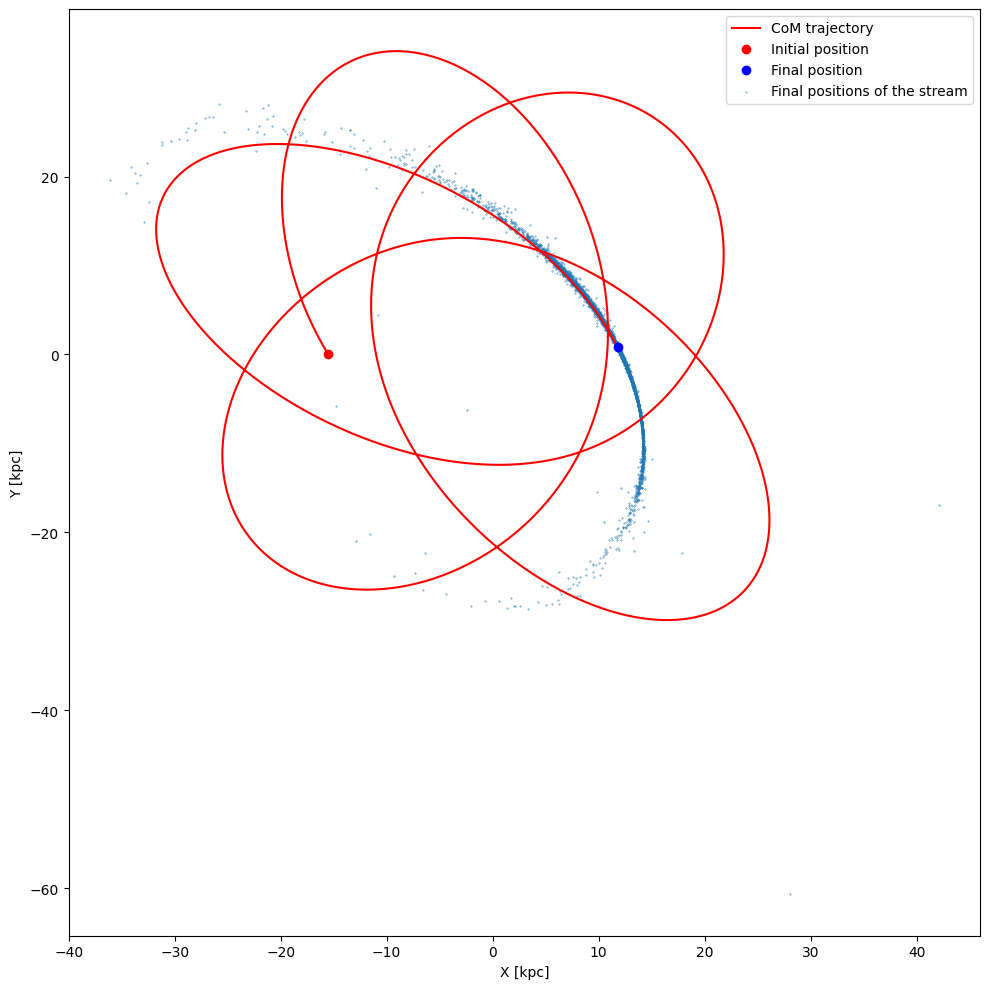
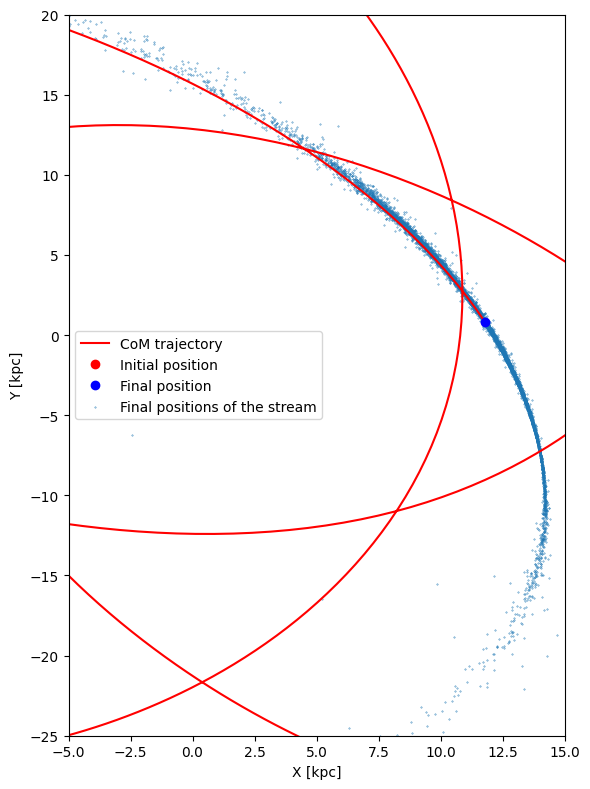
fig = plt.figure(figsize=(6, 8), tight_layout=True)
ax = fig.add_subplot(111)
conversion = code_units.code_length.to(u.kpc)
ax.plot(snapshots_com.states[:, 0, 0, 0]*conversion,
snapshots_com.states[:, 0, 0, 1]* conversion, 'r-', label='CoM trajectory')
ax.plot(snapshots_com.states[-1, 0, 0, 0]*conversion,
snapshots_com.states[-1, 0, 0, 1]*conversion, 'ro', label='Initial position')
ax.plot(snapshots_com.states[0, 0, 0, 0]*conversion,
snapshots_com.states[0, 0, 0, 1]*conversion, 'bo', label='Final position')
ax.scatter(snapshots.states[-1, :, 0, 0]*conversion,
snapshots.states[-1, :, 0, 1]*conversion, s=0.1, label='Final positions of the stream')
ax.set_xlabel("X [kpc]")
ax.set_ylabel("Y [kpc]")
ax.set_xlim(-5, 15)
ax.set_ylim(-25, 20)
ax.legend()
<matplotlib.legend.Legend at 0x7399cc6ec800>
final_state = snapshots.states[-1].copy()
final_positions, final_velocities = final_state[:, 0], final_state[:, 1]
final_positions = final_positions * code_units.code_length.to(u.kpc)
final_velocities = final_velocities * code_units.code_velocity.to(u.kpc / u.Myr)
Projection on the GD1 plane#
s = projection_on_GD1(final_state, code_units=code_units,)
R = s[:, 0] # kpc
phi1 = s[:, 1] # deg
phi2 = s[:, 2] # deg
vR = s[:, 3] # km/s
v1_cosphi2 = s[:, 4] # mass/yr
v2 = s[:, 5] # mass/yr
fig = plt.figure(figsize=(25, 5), tight_layout=True)
ax = fig.add_subplot(131)
ax.scatter(phi1, phi2, s=0.1)
ax.set_xlabel("$\phi_1$ [deg]")
ax.set_ylabel("$\phi_2$ [deg]")
ax.set_xlim(-120, 70)
ax.set_ylim(-8, 2)
ax = fig.add_subplot(132)
ax.scatter(v1_cosphi2 ,
v2 ,
s=0.1)
ax.set_xlabel("$v_{\phi_1}\cos(\phi_2)$ [mass/yr]")
ax.set_ylabel("$v_{\phi_2}$ [mass/yr]")
ax.set_xlim(-2., 1.0)
ax.set_ylim(-0.10, 0.10)
ax = fig.add_subplot(133)
ax.scatter(R, vR , s=0.1)
ax.set_xlabel("R [kpc]")
ax.set_ylabel("$v_R$ [km/s]")
ax.set_xlim(6, 20)
ax.set_ylim(-250, 250)
(-250.0, 250.0)

import matplotlib.colors as colors
fig = plt.figure(figsize=(30, 5), tight_layout=True)
# Define bin edges and create meshgrids
phi1_bins = jnp.linspace(-120, 70, 65) # 64 bins
phi2_bins = jnp.linspace(-8, 2, 33) # 32 bins
v1_bins = jnp.linspace(-2., 1.0, 65) # 64 bins
v2_bins = jnp.linspace(-0.10, 0.10, 33) # 32 bins
R_bins = jnp.linspace(6, 20, 65) # 64 bins
vR_bins = jnp.linspace(-250, 250, 33) # 32 bins
# Create meshgrids for bin edges (not centers)
PHI1, PHI2 = jnp.meshgrid(phi1_bins, phi2_bins, indexing='ij')
V1, V2 = jnp.meshgrid(v1_bins, v2_bins, indexing='ij')
R_GRID, VR_GRID = jnp.meshgrid(R_bins, vR_bins, indexing='ij')
# Create 2D histograms
ax = fig.add_subplot(131)
counts1 = jnp.histogram2d(phi1, phi2, bins=[phi1_bins, phi2_bins])[0]
im1 = ax.pcolormesh(PHI1, PHI2, np.log10(counts1), cmap='coolwarm')
ax.set_xlabel("$\phi_1$ [deg]")
ax.set_ylabel("$\phi_2$ [deg]")
ax.set_xlim(-120, 70)
ax.set_ylim(-8, 2)
# Define a normalization that centers white at 0
plt.colorbar(im1, ax=ax, label=r'$\log_{10}(\text{N}_{\text{stars}})$', )
ax = fig.add_subplot(132)
counts2 = jnp.histogram2d(v1_cosphi2, v2, bins=[v1_bins, v2_bins])[0]
im2 = ax.pcolormesh(V1, V2, np.log10(counts2), cmap='coolwarm')
ax.set_xlabel("$v_{\phi_1}\cos(\phi_2)$ [mas/yr]")
ax.set_ylabel("$v_{\phi_2}$ [mas/yr]")
ax.set_xlim(-2., 1.0)
ax.set_ylim(-0.10, 0.10)
plt.colorbar(im2, ax=ax, label=r'$\log_{10}(\text{N}_{\text{stars}})$')
ax = fig.add_subplot(133)
counts3 = jnp.histogram2d(R, vR, bins=[R_bins, vR_bins])[0]
im3 = ax.pcolormesh(R_GRID, VR_GRID, np.log10(counts3), cmap='coolwarm')
ax.set_xlabel("R [kpc]")
ax.set_ylabel("$v_R$ [km/s]")
ax.set_xlim(6, 20)
ax.set_ylim(-250, 250)
plt.colorbar(im3, ax=ax, label=r'$\log_{10}(\text{N}_{\text{stars}})$')
/tmp/ipykernel_2170897/3570116978.py:21: RuntimeWarning: divide by zero encountered in log10
im1 = ax.pcolormesh(PHI1, PHI2, np.log10(counts1), cmap='coolwarm')
/tmp/ipykernel_2170897/3570116978.py:31: RuntimeWarning: divide by zero encountered in log10
im2 = ax.pcolormesh(V1, V2, np.log10(counts2), cmap='coolwarm')
/tmp/ipykernel_2170897/3570116978.py:40: RuntimeWarning: divide by zero encountered in log10
im3 = ax.pcolormesh(R_GRID, VR_GRID, np.log10(counts3), cmap='coolwarm')
<matplotlib.colorbar.Colorbar at 0x739af417bf80>

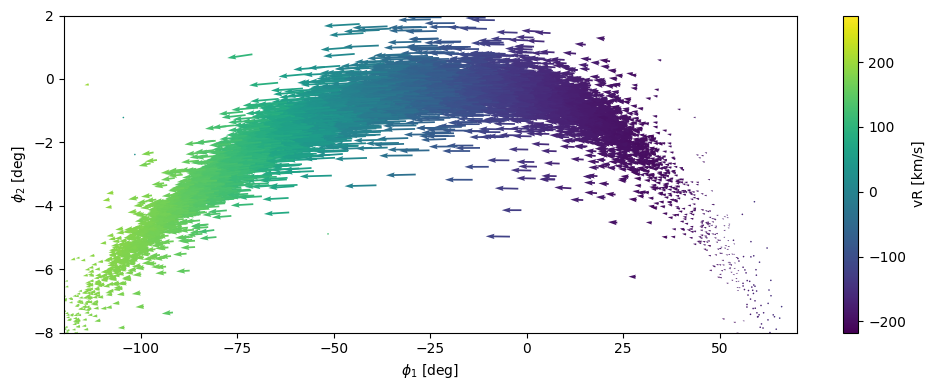
# Plotting the vector field of velocities
fig = plt.figure(figsize=(10, 4), tight_layout=True)
ax = fig.add_subplot(111)
vectorf_field = ax.quiver(phi1,
phi2,
v1_cosphi2/jnp.cos(jnp.deg2rad(phi2)),
v2,
vR,
scale=25,)
plt.colorbar(vectorf_field, ax=ax, label='vR [km/s]')
ax.set_xlabel("$\phi_1$ [deg]")
ax.set_ylabel("$\phi_2$ [deg]")
ax.set_xlim(-120, 70)
ax.set_ylim(-8, 2)
(-8.0, 2.0)
# np.savez('/export/data/vgiusepp/odisseo_data/data_fix_position/true.npz',
# x=s,
# theta=np.array([params.t_end * code_units.code_time.to(u.Gyr),
# params.Plummer_params.Mtot * code_units.code_mass.to(u.Msun),
# params.Plummer_params.a * code_units.code_length.to(u.kpc),
# params.NFW_params.Mvir * code_units.code_mass.to(u.Msun),
# params.NFW_params.r_s * code_units.code_length.to(u.kpc),
# params.MN_params.M * code_units.code_mass.to(u.Msun),
# params.MN_params.a * code_units.code_length.to(u.kpc),]))
Plummer parameters dependence#
plt.hist(jnp.linalg.norm(snapshots.states[0, :, 0] - snapshots_com.states[-1, :, 0], axis=1))
(array([9.968e+03, 2.100e+01, 6.000e+00, 2.000e+00, 1.000e+00, 0.000e+00,
0.000e+00, 1.000e+00, 0.000e+00, 1.000e+00]),
array([5.59819222e-04, 1.97572753e-01, 3.94585669e-01, 5.91598630e-01,
7.88611531e-01, 9.85624433e-01, 1.18263745e+00, 1.37965035e+00,
1.57666326e+00, 1.77367616e+00, 1.97068906e+00]),
<BarContainer object of 10 artists>)
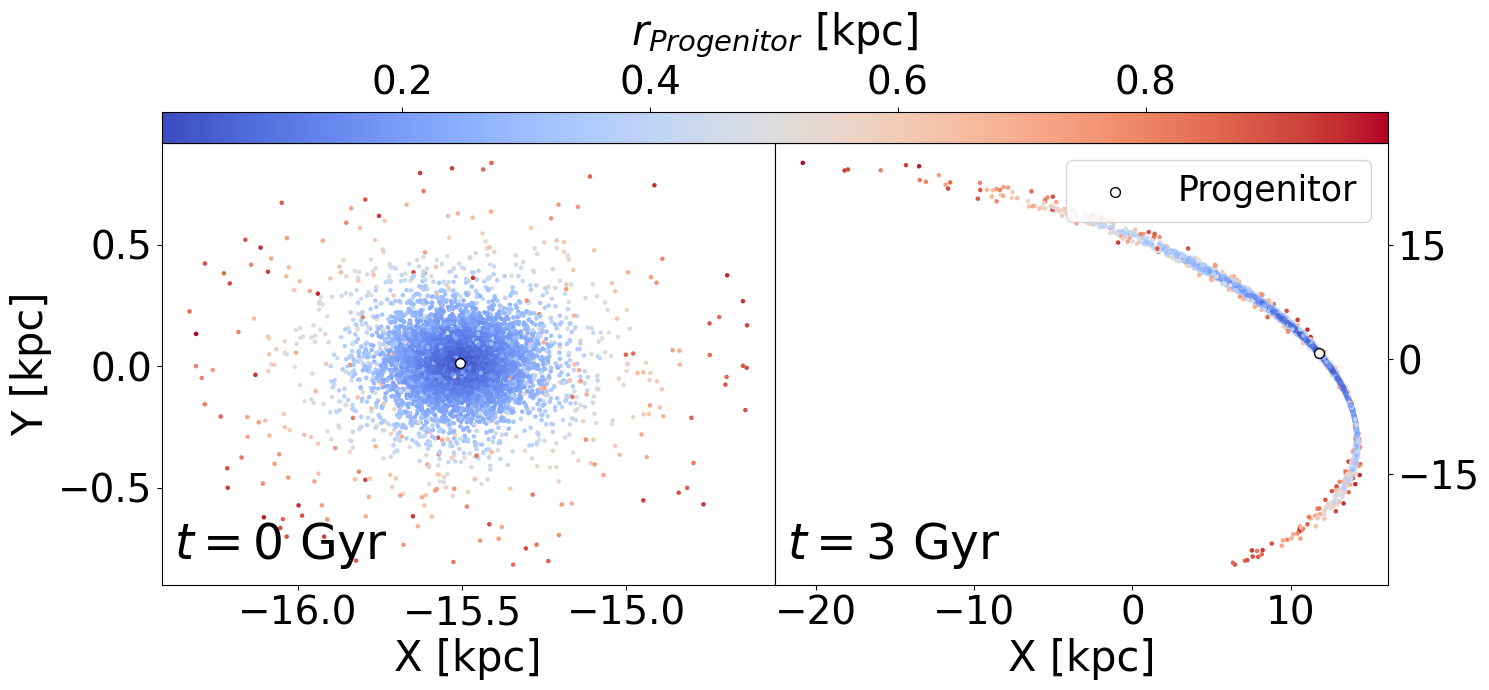
# ...existing code...
colormap = 'coolwarm'
fontsize = 30
mask = jnp.linalg.norm(snapshots.states[0, :, 0] - snapshots_com.states[-1, :, 0], axis=1) < 0.1
fig = plt.figure(figsize=(15, 7), constrained_layout=False, layout='tight')
gs = fig.add_gridspec(nrows=2, ncols=2, height_ratios=[0.07, 1.0], hspace=0.0, wspace=0.0)
ax1 = fig.add_subplot(gs[1, 0])
ax2 = fig.add_subplot(gs[1, 1])
dist0 = jnp.linalg.norm(snapshots.states[0, :, 0] - snapshots_com.states[-1, :, 0], axis=1) * code_units.code_length.to(u.kpc)
vmin, vmax = float(np.asarray(dist0[mask]).min()), float(np.asarray(dist0[mask]).max())
sc1 = ax1.scatter(
snapshots.states[0, :, 0, 0][mask] * code_units.code_length.to(u.kpc),
snapshots.states[0, :, 0, 1][mask] * code_units.code_length.to(u.kpc),
s=5, c=dist0[mask], cmap=colormap, vmin=vmin, vmax=vmax
)
ax1.scatter(
snapshots_com.states[-1, :, 0, 0]*code_units.code_length.to(u.kpc),
snapshots_com.states[-1, :, 0, 1]*code_units.code_length.to(u.kpc),
s=50, facecolors='white', edgecolors='black', marker='o'
)
ax1.set_xlabel("X [kpc]", fontsize=fontsize)
ax1.set_ylabel("Y [kpc]", fontsize=fontsize)
sc2 = ax2.scatter(
snapshots.states[-1, :, 0, 0][mask] * code_units.code_length.to(u.kpc),
snapshots.states[-1, :, 0, 1][mask] * code_units.code_length.to(u.kpc),
s=5, c=dist0[mask], cmap=sc1.cmap, norm=sc1.norm
)
ax2.scatter(
snapshots_com.states[0, :, 0, 0]*code_units.code_length.to(u.kpc),
snapshots_com.states[0, :, 0, 1]*code_units.code_length.to(u.kpc),
s=50, facecolors='white', edgecolors='black', marker='o', label='Progenitor'
)
ax2.set_xlabel("X [kpc]", fontsize=fontsize)
ax2.yaxis.set_ticks_position('right')
ax2.legend(fontsize=fontsize-5, loc='upper right')
# shared colorbar spanning both columns, placed on top
cax = fig.add_subplot(gs[0, :])
cb = fig.colorbar(sc1, cax=cax, orientation='horizontal', )
cb.set_label(r"$r_{Progenitor}$ [kpc]", fontsize=fontsize, labelpad=14)
cb.ax.xaxis.set_label_position('top')
cb.ax.xaxis.set_ticks_position('top')
cb.ax.tick_params(top=True, bottom=False, labeltop=True, labelbottom=False, labelsize=fontsize-2)
#add text annotations
ax1.text(0.02, 0.03, "$t = 0$ Gyr", transform=ax1.transAxes,
ha="left", va="bottom", fontsize=fontsize+5, color="k", zorder=10)
ax2.text(0.02, 0.03, "$t = 3$ Gyr", transform=ax2.transAxes,
ha="left", va="bottom", fontsize=fontsize+5, color="k", zorder=10)
#ticks
from matplotlib.ticker import MaxNLocator
# Reduce number of ticks and set tick label size for each subplot
ax1.xaxis.set_major_locator(MaxNLocator(nbins=4)) # <= max ~4 ticks on X
ax1.yaxis.set_major_locator(MaxNLocator(nbins=4)) # <= max ~4 ticks on Y
ax1.tick_params(axis='both', which='major', labelsize=fontsize-2)
ax2.xaxis.set_major_locator(MaxNLocator(nbins=4))
ax2.yaxis.set_major_locator(MaxNLocator(nbins=4))
ax2.tick_params(axis='both', which='major', labelsize=fontsize-2)
fig.savefig("gd1_stream_evolution.pdf", dpi=300, bbox_inches='tight')
/tmp/ipykernel_2170897/4256544036.py:7: UserWarning: The Figure parameters 'layout' and 'constrained_layout' cannot be used together. Please use 'layout' only.
fig = plt.figure(figsize=(15, 7), constrained_layout=False, layout='tight')
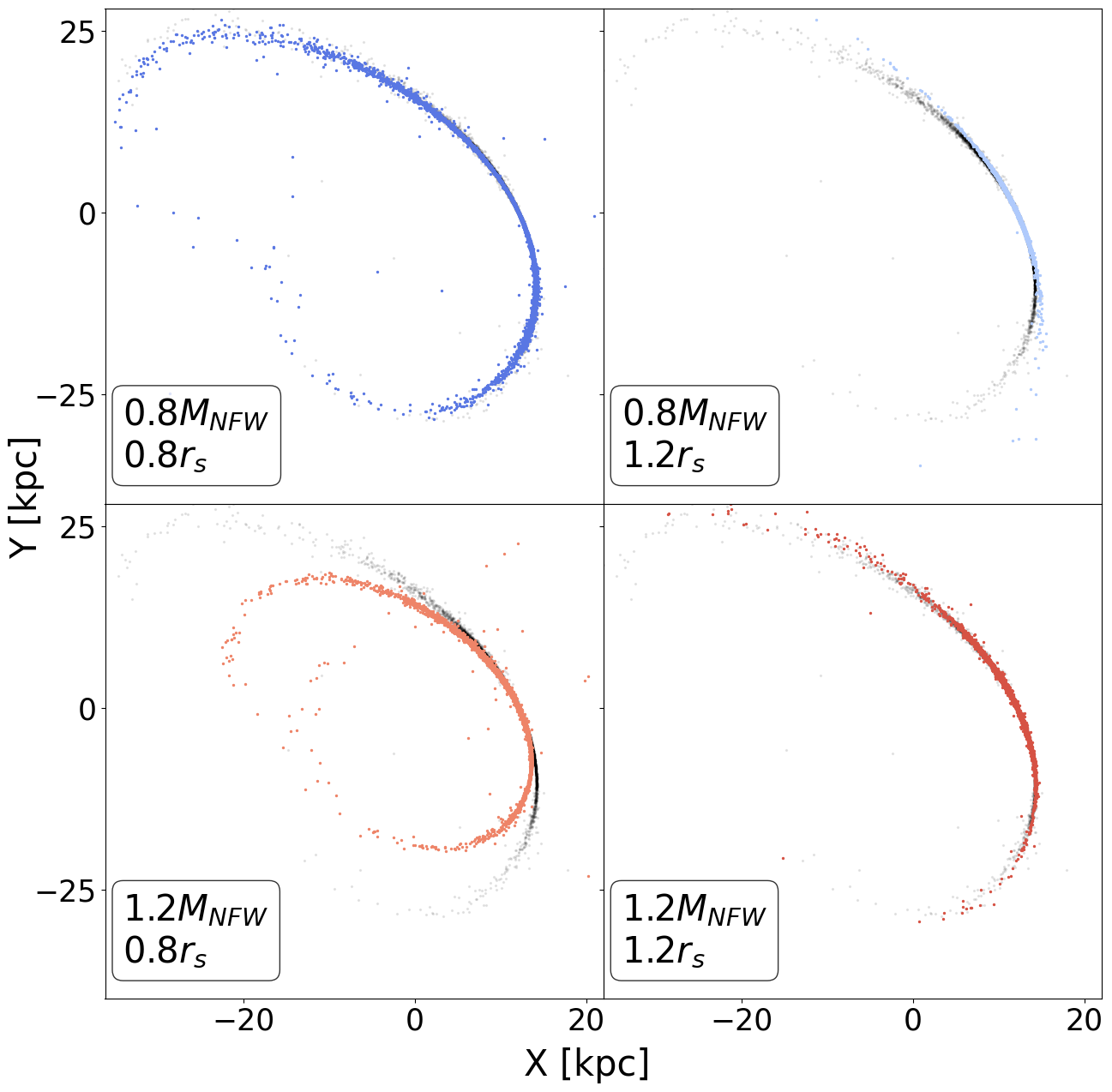
External potential parameters dependence#
config = config._replace(N_particles=10_000,
return_snapshots=False, )
config_com = config_com._replace(return_snapshots=False, )
@jit
def run_simulation(params_for_sims):
Mvir, r_s = params_for_sims
new_params = params._replace(NFW_params= NFWParams(Mvir=Mvir,
r_s= r_s,),)
#we also update the t_end parameter for the center of mass
new_params_com = new_params._replace(
t_end=-new_params.t_end # Update the t_end parameter for the center of mass
)
#Final position and velocity of the center of mass
pos_com_final = jnp.array([[11.8, 0.79, 6.4]]) * u.kpc.to(code_units.code_length)
vel_com_final = jnp.array([[109.5,-254.5,-90.3]]) * (u.km/u.s).to(code_units.code_velocity)
mass_com = jnp.array([params.Plummer_params.Mtot])
#we construmt the initial state of the com
initial_state_com = construct_initial_state(pos_com_final, vel_com_final,)
#we run the simulation backwards in time for the center of mass
final_state_com = time_integration(initial_state_com, mass_com, config=config_com, params=new_params_com)
#we calculate the final position and velocity of the center of mass
pos_com = final_state_com[:, 0]
vel_com = final_state_com[:, 1]
#we construct the initial state of the Plummer sphere
positions, velocities, mass = Plummer_sphere(key=key, params=new_params, config=config)
#we add the center of mass position and velocity to the Plummer sphere particles
positions = positions + pos_com
velocities = velocities + vel_com
#initialize the initial state
initial_state_stream = construct_initial_state(positions, velocities, )
#run the simulation
final_state = time_integration(initial_state_stream, mass, config=config, params=new_params)
return final_state
new_params = jnp.array([[params.NFW_params.Mvir * 0.8,
params.NFW_params.r_s * 0.8],
[params.NFW_params.Mvir * 0.8,
params.NFW_params.r_s * 1.2],
[params.NFW_params.Mvir * 1.2,
params.NFW_params.r_s * 0.8],
[params.NFW_params.Mvir * 1.2,
params.NFW_params.r_s * 1.2],])
new_final_states = jax.vmap(run_simulation)(new_params)
# ...existing code...
from matplotlib.ticker import MaxNLocator
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
def plot_external_potential_grid(new_final_states,
snapshots,
new_params,
labels_fontsize=20,
ticks_fontsize=20,
xy_labelpad=0,
n_xticks=4,
n_yticks=4,
colors=None):
"""2x2 grid; each panel colored by its (Mvir, r_s) ratio; legend in lower left."""
base_Mvir = params.NFW_params.Mvir
base_rs = params.NFW_params.r_s
if colors is None:
cmap = plt.get_cmap('coolwarm')
samples = [0.10, 0.35, 0.80, 0.90]
colors = [matplotlib.colors.to_hex(cmap(s)) for s in samples]
fig, axes = plt.subplots(2, 2, figsize=(15, 15), sharex=True, sharey=True)
fig.subplots_adjust(wspace=0.0, hspace=0.0)
x0 = snapshots.states[-1, :, 0, 0] * code_units.code_length.to(u.kpc)
y0 = snapshots.states[-1, :, 0, 1] * code_units.code_length.to(u.kpc)
xmin, xmax = float(x0.min()), 22.0
ymin, ymax = -40, float(y0.max())
for i, ax in enumerate(axes.flat):
# Background (reference) stream (no legend entry)
ax.scatter(
snapshots.states[-1, :, 0, 0] * code_units.code_length.to(u.kpc),
snapshots.states[-1, :, 0, 1] * code_units.code_length.to(u.kpc),
c='black', alpha=0.08, s=2
)
Mvir_ratio = float(new_params[i, 0] / base_Mvir)
rs_ratio = float(new_params[i, 1] / base_rs)
# Colored scatter for this simulation
ax.scatter(
new_final_states[i][:, 0, 0] * code_units.code_length.to(u.kpc),
new_final_states[i][:, 0, 1] * code_units.code_length.to(u.kpc),
s=2,
color=colors[i],
)
ax.text(-34, -35,
f"{Mvir_ratio:.1f}$M_{{NFW}}$ \n{rs_ratio:.1f}$r_s$",
fontsize=labels_fontsize,
bbox=dict(boxstyle="round", facecolor="white", alpha=0.8))
ax.set_xlim(xmin, xmax)
ax.set_ylim(ymin, ymax)
if i // 2 != 1:
ax.tick_params(labelbottom=False)
if i % 2 != 0:
ax.tick_params(labelleft=False)
ax.xaxis.set_major_locator(MaxNLocator(nbins=n_xticks))
ax.yaxis.set_major_locator(MaxNLocator(nbins=n_yticks))
ax.tick_params(axis='both', which='major', labelsize=ticks_fontsize)
# Legend in lower left
# ax.legend(loc='lower left', fontsize=ticks_fontsize, frameon=True)
fig.text(0.5, 0.02 + xy_labelpad, "X [kpc]", ha='center', fontsize=labels_fontsize)
fig.text(0.02 + xy_labelpad, 0.5, "Y [kpc]", va='center', rotation='vertical', fontsize=labels_fontsize)
return fig, axes
# Example call
fig, axes = plot_external_potential_grid(new_final_states,
snapshots,
new_params=new_params,
labels_fontsize=30,
ticks_fontsize=25,
xy_labelpad=0.03,
n_xticks=3,
n_yticks=3,
colors=None)
fig.savefig("initial_params_dependence.pdf", dpi=300, bbox_inches='tight')
# ...existing code...